Colposcopic Training Simulator
Collaborators
This project was done in collaboration with NUHS Obstetrics and Gynaecology.
Overview
Building confidence, bridging and evaluating clinical skills through a Loop Electrosurgical Excision Procedure (LEEP) training simulator.
Background
The existing gap in LEEP training is multifold. The procedure is performed intravaginally under colposcopic magnification and illumination to allow for clear visualization of the lesion to be removed. The removal of lesion requires a high degree of psychomotor coordination and precision in a limited operational area done under the magnification with colposcope.
Traditionally, the training for this procedure has been preceptor-based learning, but trainers are unable to guide or correct a trainee's actions during the procedure. In addition, this procedure is commonly performed under local anesthesia in an awake patient, which can inhibit the free flow of verbal instructions to the trainee. Simulator-based training for such procedures would have significant value prior to a trainee’s first surgery to reduce the risk of cervical cancer due to inadequate training.
Key Problem(s)
Existing simulators are limited in providing functional training platform for trainees to practice LEEP and for trainers to be confident in their skills.
Objective
The aim of the project is to design a LEEP training simulator that simulates the functional environment of the procedure.
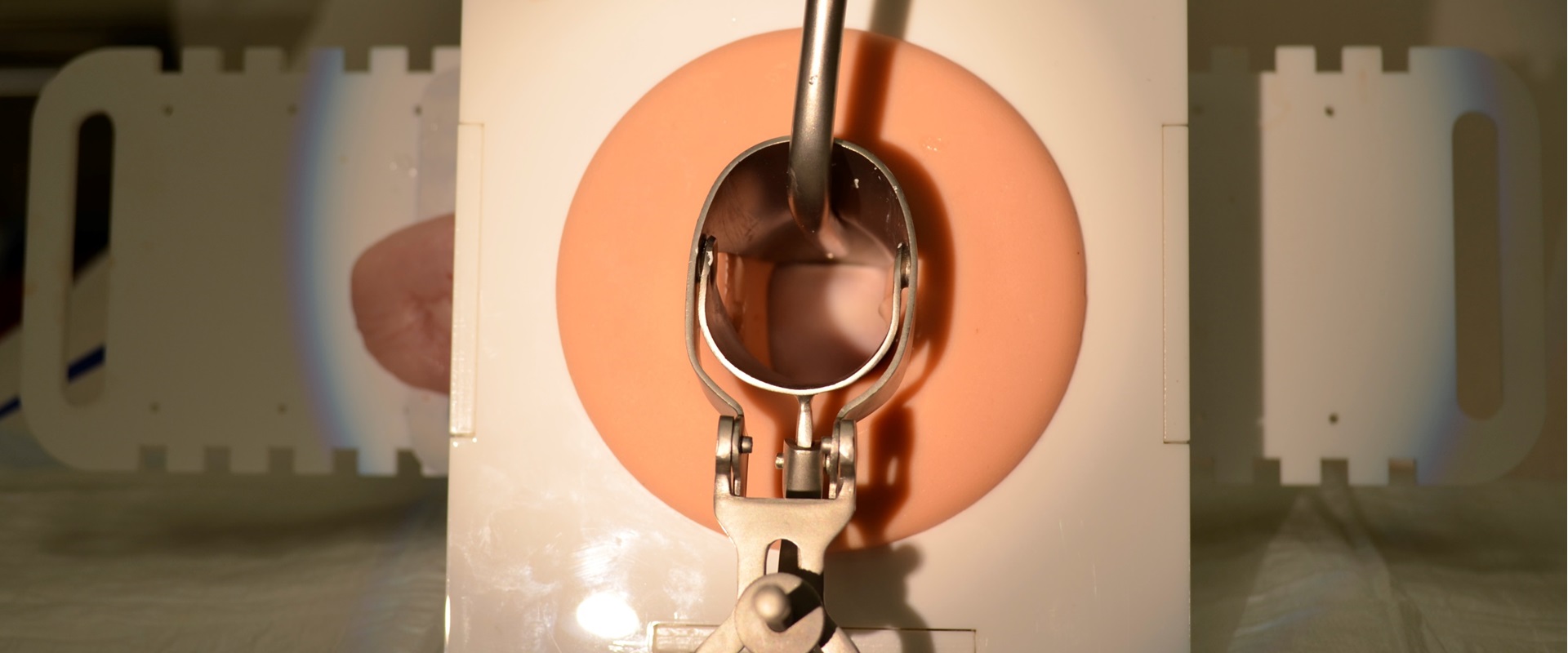
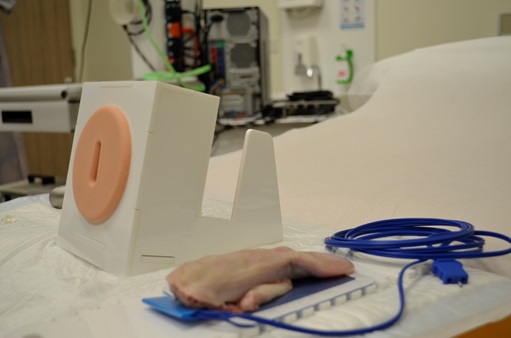
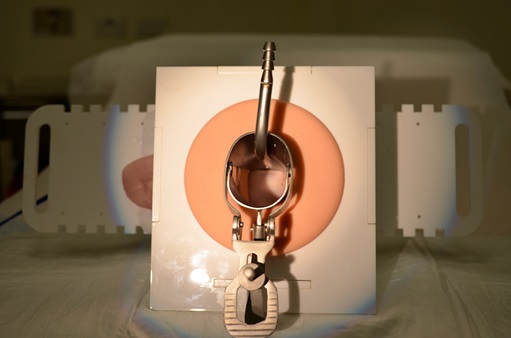
Solution
A 3D printed case casted with silicone has been created to simulate the vaginal canal. This simulator enables practitioners to train how to eradicate lesions. The material used to simulate the lesions is a reusable component that holds similar tension to an actual lesion to translate the tacit knowledge of the depth and speed required to operate LEEP. The material collected from the practice is used to evaluate the readiness of the trainees and to give trainers the confidence that the patient is in good hands. The simulator is portable and light for trainers to conduct workshops overseas and in non-clinical settings. As with all simulators, parts susceptible to wear-and-tear can be easily replaced due to its modular design.
Deployment and Usage
This project was showcased at the following locations:
- ASCCP 2019
- BSCCP 2019
- RCOG 2019
- SCCPS 2019
Gallery


Project Contact
Yen Ching-Chiuan
didyc at nus.edu.sg
Teo Chor Guan
idmtcg at nus.edu.sg
Team Members
Eason Chow Wai Tung
Dr.Ida Ismail
Raymond Hon
Mandi Lee